
Propocitos de la materia: Identificará los conceptos fundamentales fuerza, masa, e interacciones materia-energía, a través del desarrollo y la articulación de saberes sobre las propiedades mecánicas de la materia en los estados de agregación sólido y líquido, considerando los principios de la hidrostática y la hidrodinámica; los conceptos de calor y temperatura en el campo de la termología y de la termodinámica, mediante el establecimiento de las relaciones entre ellos y su vida cotidiana; la obtención, registro y sistematización de la información a través de actividades experimentales y la consulta de fuentes relevantes para responder a preguntas de carácter científico.
Relación con otras asignaturas: Los fenómenos que estudia la física se caracterizan por ser esencialmente
cuantitativos: una pelota de fútbol que es golpeada por los jugadores, se moverá a
mayor distancia mientras más fuerte sea golpeada; ésta es una experiencia que
todos tenemos, pero para explicar cuantitativa mente dicho comportamiento de la
pelota, la física requiere de las matemáticas y de allí su vinculación.
Para expresar correctamente el contenido de una ley física, para discutir cómo se
mueve un cuerpo y para interpretar un texto de física sin cometer errores en su
lectura, requerimos del conocimiento de la lengua española.
La evolución del conocimiento de los fenómenos físicos ha estado íntimamente
ligado al desarrollo histórico de la sociedad. Las ideas de Aristóteles sobre el
movimiento de los cuerpos duró 17 siglos; hasta que Kepler, Galileo, Newton y
otros científicos demostraron los errores de estas ideas. Indudablemente que este
hecho estuvo determinado por las condiciones históricas y sociales.
Los proyectos de una investigación física están vinculados a los factores
económicos, y esta ciencia, a su vez, se desarrolla con el progreso de la física.
Como ejemplo tenemos los recursos económicos y financieros que generan la
computación.
Por último, la frontera entre los fenómenos químicos, biológicos y físicos, cada vez
son más imprecisos, dando lugar a disciplinas combinadas, como la biofísica,
bioquímica, fisicoquímica y otras.

Competencias Propuestas Para el Desarrollo de Fisica II:
a) Utilizar constantemente el método científico, identificando en cada proceso
de enseñanza: lo que se observa, el modelo físico, la ley física y la
comprobación.
b) Crear estados psicológicos en el estudiante que promuevan su interés y
motivación hacia el aprendizaje, aumentando su nivel de participación con el
uso de demostraciones experimentales en clase.
c) Combinar adecuadamente la exposición del profesor, las actividades
participativas del grupo y la experimentación en el laboratorio (conferencia,
seminario de grupo y práctica de laboratorio). A continuación, brevemente se
indican:
Conferencia. Actividad en la que el profesor orienta, organiza y expone en forma
lógica un contenido temático, con el uso de experimentos de clase o los medios
didácticos necesarios, e interactúa con los estudiantes, mediante preguntas que
permitan su participación activa.
Seminario de grupo. Actividad docente encaminada a lograr de los estudiantes la
exposición o discusión de conceptos, resultados, interpretación física de
fenómenos o la solución de problemas; o bien, actividades en las cuales los
estudiantes en forma individual o en grupos resuelven problemas numéricos o de
fenómenos físicos planteados por el profesor.
Prácticas de laboratorio. Es una forma de enseñanza activa donde los
estudiantes, en el laboratorio, desarrollan con materiales o equipos:
observaciones, mediciones, gráficas, identificación de parámetros, cálculos y
conclusiones sobre experimentos físicos; así adquieren, entre otras, habilidades
manuales y de observación cuidadosa y sistemática.
Estructura conceptual de Fisica II:

Historia de la Fisica:
*La física es una de las más antiguas disciplinas académicas, tal vez la más antigua, ya que la astronomía es una de sus disciplinas. En los últimos dos milenios, la física fue considerada dentro de lo que ahora llamamos filosofía, química, y ciertas ramas de la matemática y la biología, pero durante la Revolución Científica en el siglo XVII surgió para convertirse en una ciencia moderna, única por derecho propio. Sin embargo, en algunas esferas como la física matemática y la química cuántica, los límites de la física siguen siendo difíciles de distinguir.

* Es conocido que la mayoría de las civilizaciones de la antigüedad trataron desde un principio de explicar el funcionamiento de su entorno; miraban las estrellas y pensaban cómo ellas podían regir su mundo.
* Esto llevó a muchas interpretaciones de carácter más filosófico que físico; no en vano en esos momentos a la física se le llamaba filosofía natural. Muchos filósofos se encuentran en el desarrollo primigenio de la física, como Aristóteles, Tales de Mileto o Demócrito, por ser los primeros en tratar de buscar algún tipo de explicación a los fenómenos que les rodeaban.

*Esta etapa, denominada oscurantismo en la ciencia de Europa, termina cuando el canónigo y científico Nicolás Copérnico, considerado padre de la astronomía moderna, en 1543 recibe la primera copia de su De Revolutionibus Orbium Coelestium.
*Copérnico fue el primero en formular teorías plausibles, es otro personaje al cual se le considera el padre de la física como la conocemos ahora.
* Un catedrático de matemáticas de la Universidad de Pisa a finales del siglo XVI cambiaría la historia de la ciencia, empleando por primera vez experimentos para comprobar sus aseveraciones: Galileo Galilei. Mediante el uso del telescopio para observar el firmamento y sus trabajos en planos inclinados, Galileo empleó por primera vez el método científico y llegó a conclusiones capaces de ser verificadas. A sus trabajos se les unieron grandes contribuciones por parte de otros científicos como Johannes Kepler, Blaise Pascal y Christian Huygens.
*Posteriormente, en el siglo XVII un científico inglés reunió las ideas de Galileo y Kepler en un solo trabajo, unifica las ideas del movimiento celeste y las de los movimientos en la Tierra en lo que él llamo gravedad.

*En 1687, Isaac Newton, en su obra Philosophiae Naturalis Principia Mathematica, formuló los tres principios del movimiento y una cuarta ley de la gravitación universal, que transformaron por completo el mundo físico; todos los fenómenos podían ser vistos de una manera mecánica.
*En el siglo XIX se produjeron avances fundamentales en la electricidad y el magnetismo, principalmente de la mano de Charles-Augustin de Coulomb, Luigi Galvani, Michael Faraday y Georg Simon Ohm, que culminaron en el trabajo de James Clerk Maxwell de 1855, que logró la unificación de ambas ramas en el llamado electromagnetismo. Además, se producen los primeros descubrimientos sobre radiactividad y el descubrimiento del electrón por parte de Joseph John Thomson en 1897.
*Posteriormente se formuló la teoría cuántica de campos, para extender la mecánica cuántica de acuerdo con la Teoría de la Relatividad especial, alcanzando su forma moderna a finales de la década de 1940, gracias al trabajo de Richard Feynman, Julian Schwinger, Tomonaga y Freeman Dyson, que formularon la teoría de la electrodinámica cuántica.
* En 1954, Chen Ning Yang y Robert Mills desarrollaron las bases del modelo estándar. Este modelo se completó en los años 1970, y con él fue posible predecir las propiedades de partículas no observadas previamente, pero que fueron descubiertas sucesivamente, siendo la última de ellas el quark top.

Programa de la materia de Física II
1. leyes de newton y sus referencias.
1.1 Objeto de estudio de la dinámica de la traslación.
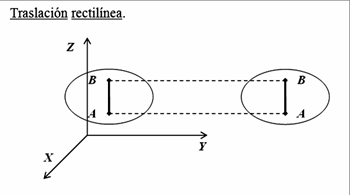
— Definición de movimiento de traslación.
— Modelo de la partícula.
1.2 Primera ley de Newton.
— Enunciado de la ley.
— Sistemas de referencia inerciales.
1.3 Segunda ley de Newton.
— Concepto de interacción, carácter universal y permanente.
— Modelo físico de “fuerza” como vector que expresa las características de las
interacciones.
— Medición de fuerzas con dinamómetros. Unidades.
— Enunciado de la 2ª ley de Newton para la traslación.
— Concepto de masa inercial como medida de una propiedad de todos los
cuerpos. Unidades.
1.4 Tercera ley de Newton.
— Carácter recíproco de las interacciones.
2. Causas del movimiento traslación.
2. Causas del movimiento traslación.
2.1 Interacciones mecánicas.
— Interacción gravitatoria. La masa gravitatoria como causa. Ley de la fuerza
gravitatoria.
— Interacción entre cuerpos sólidos en contacto. Fuerza de reacción normal y
peso de los cuerpos.
— Interacción elástica o por deformación. Fuerza elástica en sistema cuerporesorte.
Ejercicios.
— Interacción entre sólidos con tendencia a movimiento relativo de uno
respecto al otro. Fuerza de fricción estática. Ejercicios.
— Interacción entre sólidos con movimiento relativo de un sólido respecto a
otro. Fuerza de fricción cinética o dinámica.
2.2 Método dinámico de solución de problemas de movimiento de traslación.
3. Causas del movimiento rotación.
3.1 Dinámica del movimiento de rotación.
— Concepto de rotación de un cuerpo alrededor de un eje fijo.
— Concepto de aceleración angular.
— Modelo del cuerpo rígido para representar los cuerpos que rotan.
— Torca o momento de fuerzas respecto a un eje.
— Momento de inercia de un cuerpo que rota respecto a un eje.
— Carácter relativo de esta magnitud.
— Magnitudes de que depende. Ejercicios.
3.2 Ecuación fundamental de la dinámica de la rotación.
— Ecuación fundamental de la rotación alrededor del eje fijo.
— Analogías y diferencias entre la segunda ley de Newton de traslación y de la
rotación.
— Aplicación del método dinámico a la solución de problemas de cuerpos que
4.1. Cantidad de movimiento lineal.
— Concepto de cantidad de movimiento lineal.
— Para una partícula.
— Para sistema de partículas.
— Cálculo de cantidad de movimiento.
— Impulso de una fuerza y su relación con la variación de cantidad de
movimiento.
— Ley de conservación de la cantidad de movimiento y cálculo de su
aplicación.
4.2. Cantidad de movimiento angular.
— Definición de la cantidad de movimiento angular de un cuerpo que rota.
— Cálculos de cantidad de movimiento angular.
— Ley de conservación del momento o cantidad de movimiento angular.
5. Trabajo de una fuerza y energías mecánicas.
5.1 Trabajo mecánico y energía cinética.
— Trabajo mecánico de una fuerza.
— Definición e interpretación del trabajo mecánico.
— Cálculos sencillos de trabajo de fuerzas.
— Energía cinética:
§ De un cuerpo en traslación.
§ De un cuerpo en rotación.
§ Ejercicios de cálculos de energía cinética.
— Teorema del trabajo de la fuerza resultante y la energía cinética. Ejercicios.
5.2 Trabajo de fuerzas conservativas.
— Trabajo de la fuerza de gravedad.
— Concepto de energía potencial gravitatoria.
— Trabajo de la fuerza elástica.
— Concepto de energía potencial elástica.
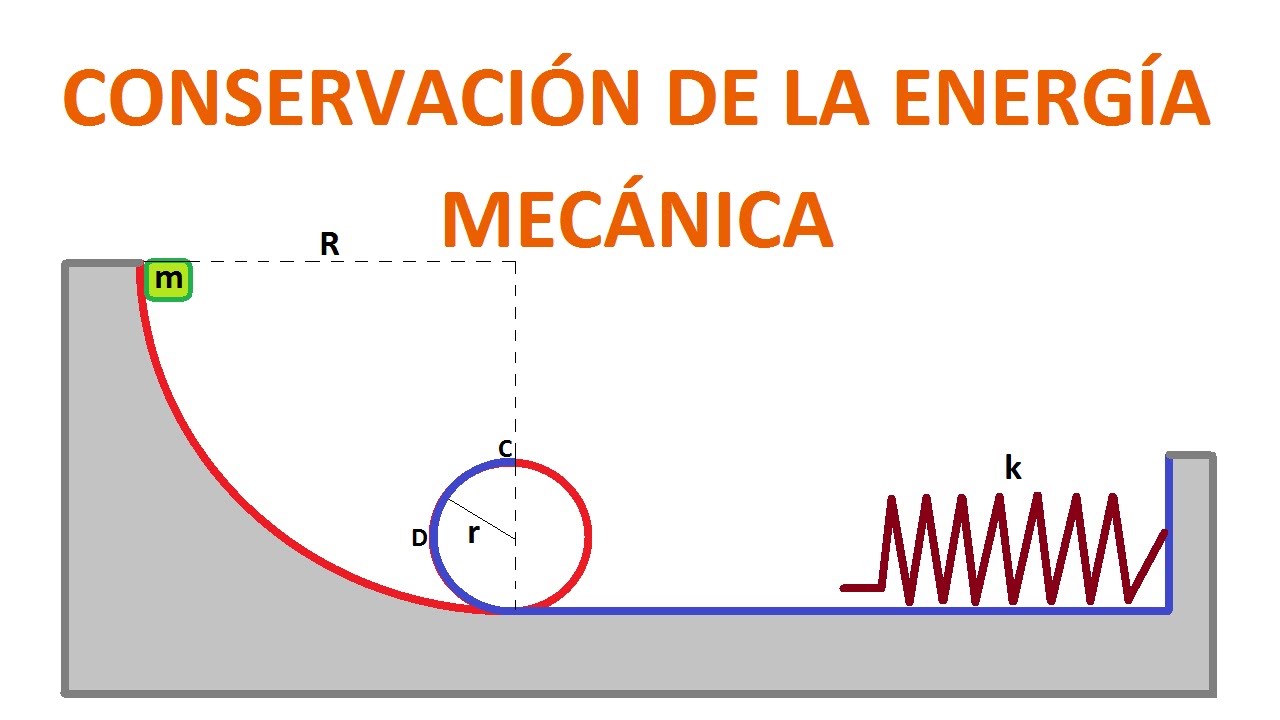
5.3 Energía mecánica. Ley de conservación.
— Concepto de energía mecánica.
— Variación de la energía mecánica por el trabajo de las fuerzas no
conservativas: Wnc = ?E
— Conservación de la energía mecánica: Wnc= 0 = ?E ? Ei = E¦
5.4 Choques.
— Concepto de choque entre partículas.
— Clasificación en elásticas e inelásticas.
— Leyes de conservación en los choques elásticos.
— Conservación de la cantidad de movimiento lineal.
— Conservación de la energía mecánica.
— Choque plástico, como caso particular de los choques inelásticos
1. leyes de newton y sus referencias.
1. leyes de newton y sus referencias.
1.1 Objeto de estudio de la dinámica de la traslación.
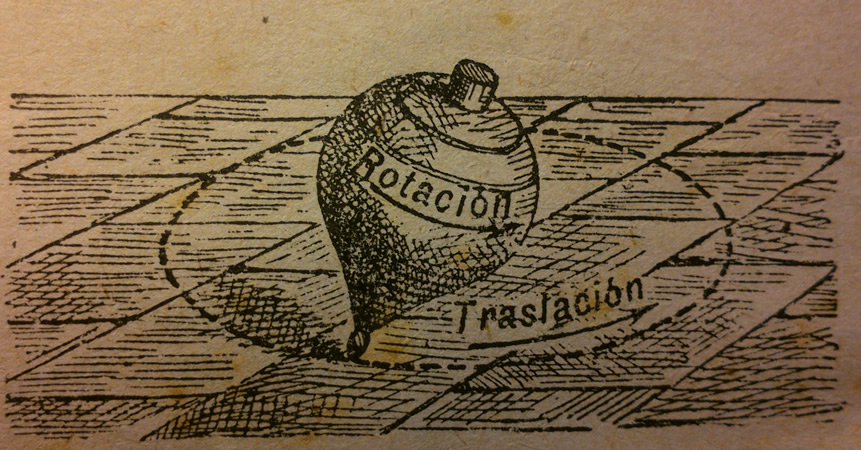
—En física, la traslación es un movimiento en el cual se modifica la posición de un objeto, en contraposición a una rotación.
— Modelo de la partícula: El modelo estándar de la física de partículas es una teoría que describe las relaciones entre las interacciones fundamentales conocidas y las partículas elementales que componen toda la materia. Es una teoría cuántica de campos desarrollada entre 1970 y 1973 que es consistente con la mecánica cuántica y la relatividad especial. Hasta la fecha, casi todas las pruebas experimentales de las tres fuerzas descritas por el modelo estándar están de acuerdo con sus predicciones. Sin embargo, el modelo estándar no alcanza a ser una teoría completa de las interacciones fundamentales debido a que no incluye la gravedad, la cuarta interacción fundamental conocida, y debido también al número elevado de parámetros numéricos (tales como masas y constantes que se juntan) que se deben poner a mano en la teoría (en vez de derivarse a partir de primeros principios).

1.2 Primera ley de Newton.
— Las leyes de Newton, también conocidas como leyes del movimiento de Newton, son tres principios a partir de los cuales se explican la mayor parte de los problemas planteados por la mecánica, en particular aquellos relativos al movimiento de los cuerpos, que revolucionaron los conceptos básicos de la física y el movimiento de los cuerpos en el universo.
— Sistemas de referencia inerciales.
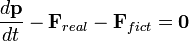
En mecánica newtoniana, un sistema de referencia inercial es un sistema de referencia en el que las leyes del movimiento cumplen las leyes de Newton y, por tanto, la variación del momento lineal del sistema es igual a las fuerzas reales sobre el sistema, es decir un sistema en el que:En cambio la descripción newtoniana de un sistema no-inercial requiere la introducción de fuerzas ficticias o inerciales de tal manera que:

Esto lleva a una definición alternativa, un sistema inercial es aquel en que el movimiento de las partículas puede describirse empleando sólo fuerzas reales sin necesidad de considerar fuerzas ficticias.
El concepto de sistema de referencia inercial también es aplicable a teorías más generales que la mecánica newtoniana. Así, en la Teoría de la relatividad especial también se pueden introducir los sistemas inerciales. Aunque en relatividad especial la caracterización matemática no coincide con la que se da en mecánica newtoniana, debido a que la segunda ley de Newton, tal como la formuló, no se cumple en la Teoría de la relatividad. El concepto de sistema de referencia no fue establecido hasta dos siglos después de la formulación de las leyes de Newton (1687), cuando Ludwig Lange (1885) introdujo el concepto en un intento de eliminar la necesidad de un espacio y un tiempo absolutos del tipo que Newton conjeturaba. Estas ideas fueron, poco más tarde, consideradas en la formulación de la Teoría Especial de la Relatividad.
1.3 Segunda ley de Newton.
— La interacción es una acción recíproca entre dos o más objetos, sustancias, personas o agentes.[1] Según su campo de aplicación, el término puede referirse a: En física, frecuentemente usado como sinónimo de campo de fuerza.
— En física, un vector (también llamado vector euclidiano o vector geométrico) es una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo (o longitud) y una dirección (u orientación).
En Matemáticas se define un vector como un elemento de un espacio vectorial. Esta noción es más abstracta y para muchos espacios vectoriales no es posible representar sus vectores mediante el módulo y la dirección. En particular los espacios de dimensión infinita sin producto escalar no son representables de ese modo. Los vectores en un espacio euclídeo se pueden representar geométricamente como segmentos de recta dirigidos en el plano  o en el espacio
o en el espacio  .
.
La fuerza es una magnitud física de carácter vectorial capaz de deformar los cuerpos (efecto estático), modificar su velocidad o vencer su inercia y ponerlos en movimiento si estaban inmóviles (efecto dinámico). En este sentido la fuerza puede definirse como toda acción o influencia capaz de modificar el estado de movimiento o de reposo de un cuerpo (imprimiéndole una aceleración que modifica el módulo o la dirección de su velocidad).
Comúnmente nos referimos a la fuerza aplicada sobre un objeto sin tener en cuenta al otro objeto u objetos con los que está interactuando y que experimentarán, a su vez, otras fuerzas. Actualmente, cabe definir la fuerza como un ente físico-matemático, de carácter vectorial, asociado con la interacción del cuerpo con otros cuerpos que constituyen su entorno.

—Esta ley se encarga de cuantificar el concepto de fuerza. La aceleración que adquiere un cuerpo es proporcional a la fuerza neta aplicada sobre el mismo. La constante de proporcionalidad es la masa del cuerpo (que puede ser o no ser constante). Entender la fuerza como la causa del cambio de movimiento y la proporcionalidad entre la fuerza impresa y el cambio de la velocidad de un cuerpo es la esencia de esta segunda ley.

— En física, la masa inercial es una medida de la resistencia de una masa al cambio de velocidad en relación con un sistema de referencia inercial. En física clásica la masa inercial de partículas puntuales se define mediante la siguiente ecuación:

 );
);  es la masa inercial de la partícula
es la masa inercial de la partícula  ;
;  es la aceleración inicial de la partícula , en la dirección de la partícula hacia la partícula
es la aceleración inicial de la partícula , en la dirección de la partícula hacia la partícula  , en un volumen ocupado sólo por partículas y , donde ambas partículas están inicialmente en reposo y a una distancia unidad.
, en un volumen ocupado sólo por partículas y , donde ambas partículas están inicialmente en reposo y a una distancia unidad.No hay fuerzas externas, pero las partículas ejercen fuerza las unas en las otras. La masa inercial es igual a la masa gravitacional. Este último principio es la base de la teoría general de la relatividad, propuesta por Einstein en 1916.

1.4 Tercera ley de Newton.
— En física, se denominan interacciones fundamentales los cuatro tipos de campos cuánticos mediante los cuales interactúan las partículas. Según el modelo estándar, las partículas que interaccionan con las partículas materiales, fermiones, son los bosones.
Existen 4 tipos de interacciones fundamentales: interacción nuclear fuerte, interacción nuclear débil, interacción electromagnética e interacción gravitatoria. Casi toda la historia de la física moderna se ha centrado en la unificación de estas interacciones, y hasta ahora la interacción débil y la electromagnética se han podido unificar en la interacción electrodébil. En cambio, la unificación de la fuerte con la electrodébil es el motivo de toda la teoría de la gran unificación. Y finalmente, la teoría del todo involucraría esta interacción electronuclear con la gravedad.La comunidad científica prefiere el nombre de interacciones fundamentales al de fuerzas debido a que con ese término se pueden referir tanto a las fuerzas como a los decaimientos que afectan a una partícula dada.

2. Causas del movimiento traslación.
2.1 Interacciones mecánicas.
— La masa gravitacional es la medida de la fuerza de atracción gravitatoria que experimenta una porción de materia másica dentro de un campo gravitatorio.
Aunque numéricamente idéntica a la masa inercial, conceptualmente difiere de ésta. En el seno de la mecánica clásica resultó por mucho tiempo un misterio el por qué la masa gravitacional era numéricamente igual a la masa inercial, de ahí que usualmente se hable simplemente de masa (sin especificar si se trata de la inercial o la gravitacional), al ser ambas numéricamente idénticas.La teoría de la relatividad general, al explicar el campo gravitatorio como un efecto de la curvatura del espacio-tiempo, aclaró que de hecho la masa gravitacional coincidiera numéricamente con la masa inercial.

— Los cuerpos sólidos están formados por átomos densamente empaquetados con intensas fuerzas de interacción entre ellos. Los efectos de interacción son responsables de las propiedades mecánicas, térmicas, eléctricas,magnéticas y ópticas de los sólidos.
Una característica importante de la mayoría de los sólidos es su estructura cristalina. Los átomos están distribuidos en posiciones regulares que se repiten regularmente de manera geométrica. La distribución específica de los átomos puede deberse a una variada gama de fuerzas. Por ejemplo, algunos sólidos como el cloruro de sodio o sal común se mantienen unidos por enlaces iónicos debidos a la interacción electrostática entre los iones que componen el material. En otros, como el diamante, los átomos comparten electrones, lo que da lugar a los llamados enlaces covalentes.Las sustancias inertes, como el neón, no presentan ninguno de esos enlaces. Su existencia es el resultado de unas fuerzas de atracción conocidas como fuerzas de Van der Waals, así llamadas en honor al físico holandés Johannes Diderik van der Waals. Estas fuerzas aparecen entre átomos neutros o moléculas como resultado de la polarización eléctrica. Los metales, se mantienen unidos por lo que se conoce como gas electrónico, formado por electrones libres de la capa atómica externa compartidos por todos los átomos del metal y que definen la mayoría de sus propiedades. también presenta características del estado sólido.

— La forma más común de representar matemáticamente la Ley de Hooke es mediante la ecuación del muelle o resorte, donde se relaciona la fuerza  ejercida por el resorte con la elongación o alargamiento
ejercida por el resorte con la elongación o alargamiento  provocado por la fuerza externa aplicada al extremo del mismo:
provocado por la fuerza externa aplicada al extremo del mismo:
ejercida por el resorte con la elongación o alargamiento provocado por la fuerza externa aplicada al extremo del mismo:donde

 se llama constante elástica del resorte y es su elongación o variación que experimenta su longitud.
se llama constante elástica del resorte y es su elongación o variación que experimenta su longitud.La energía de deformación o energía potencial elástica
 asociada al estiramiento del resorte viene dada por la siguiente ecuación:
asociada al estiramiento del resorte viene dada por la siguiente ecuación:Es importante notar que la
 antes definida depende de la longitud del muelle y de su constitución. Definiremos ahora una constante intrínseca del resorte independiente de la longitud de este y estableceremos así la ley diferencial constitutiva de un muelle. Multiplicando por la longitud total, y llamando al producto
antes definida depende de la longitud del muelle y de su constitución. Definiremos ahora una constante intrínseca del resorte independiente de la longitud de este y estableceremos así la ley diferencial constitutiva de un muelle. Multiplicando por la longitud total, y llamando al producto  o intrínseca, se tiene:
o intrínseca, se tiene:Llamaremos

 a la tensión en una sección del muelle situada una distancia x de uno de sus extremos que tomamos como origen de coordenadas,
a la tensión en una sección del muelle situada una distancia x de uno de sus extremos que tomamos como origen de coordenadas,  a la constante de un pequeño trozo de muelle de longitud
a la constante de un pequeño trozo de muelle de longitud  a la misma distancia y
a la misma distancia y  al alargamiento de ese pequeño trozo en virtud de la aplicación de la fuerza . Por la ley del muelle completo:
al alargamiento de ese pequeño trozo en virtud de la aplicación de la fuerza . Por la ley del muelle completo:Tomando el límite:

que por el principio de superposición resulta:

Que es la ecuación diferencial del muelle. Si se integra para todo

 , se obtiene como ecuación de onda unidimensional que describe los fenómenos ondulatorios (Ver: Muelle elástico). La velocidad de propagación de las vibraciones en un resorte se calcula como:
, se obtiene como ecuación de onda unidimensional que describe los fenómenos ondulatorios (Ver: Muelle elástico). La velocidad de propagación de las vibraciones en un resorte se calcula como:
— Si tenemos varios sólidos, a cada uno de ellos irá asociado un sistema de referencia y una distribución de velocidades para todos los puntos del espacio, independientemente de si forman parte del medio material o no. Es más, en la descripción de un problema aparecen usualmente sólidos intermedios que no poseen existencia material alguna. Usaremos las expresiones "sólido" y "sistema de referencia" de manera sinónima.
Un punto P del espacio no pertenecerá entonces a un sólido en concreto, sino a todos ellos simultáneamente. 
2.2 Método dinámico de solución de problemas de movimiento de traslación.
donde

 es un vector constante. Dicha operación puede ser generalizada a otras coordenadas, por ejemplo la coordenada temporal. Obviamente una traslación matemática es una isometría del espacio euclídeo.
es un vector constante. Dicha operación puede ser generalizada a otras coordenadas, por ejemplo la coordenada temporal. Obviamente una traslación matemática es una isometría del espacio euclídeo.Para un objeto que no posee estructura, como por ejemplo un subconjunto del espacio, se considera el rango del subconjunto afectado por la transformación. En forma alternativa, es posible definir una traslación como una operación sobre los objetos, tal que todas sus propiedades como color, composición, etc. se corresponden. Pero no deben confundirse las dos: una traslación del espacio no posee puntos fijos, los puntos fijos de una traslación en el otro sentido son los objetos con sus correspondientes simetrías de traslación. De acuerdo con el teorema de Noether, la simetría de traslación es equivalente a la conservación del momento de fuerza.
4. Leyes de conservación





El trabajo realizado por la fuerza durante un desplazamiento elemental de la partícula sobre la que está aplicada es una magnitud escalar, que podrá ser positiva, nula o negativa, según que el ángulo
durante un desplazamiento elemental de la partícula sobre la que está aplicada es una magnitud escalar, que podrá ser positiva, nula o negativa, según que el ángulo  sea agudo, recto u obtuso.
sea agudo, recto u obtuso.






Cuestionario.



3. Causas del movimiento rotación.
3.1 Dinámica del movimiento de rotación.
— Rotación es el movimiento de cambio de orientación de un cuerpo o un sistema de referencia de forma que una línea (llamada eje de rotación) o un punto permanece fijo.
La rotación de un cuerpo se representa mediante un operador que afecta a un conjunto de puntos o vectores. El movimiento rotatorio se representa mediante el vector velocidad angular  , que es un vector de carácter deslizante y situado sobre el eje de rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice que el cuerpo «gira sobre sí mismo».
, que es un vector de carácter deslizante y situado sobre el eje de rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice que el cuerpo «gira sobre sí mismo».
, que es un vector de carácter deslizante y situado sobre el eje de rotación. Cuando el eje pasa por el centro de masa o de gravedad se dice que el cuerpo «gira sobre sí mismo».
— En física, la aceleración es una magnitud vectorial que nos indica la variación de velocidad por unidad de tiempo. En el contexto de la mecánica vectorial newtoniana se representa normalmente por  o
o  y su módulo por
y su módulo por  . Sus dimensiones son
. Sus dimensiones son ![\scriptstyle [ L \cdot T^{-2} ]](https://upload.wikimedia.org/math/8/d/9/8d93fafc52fa31cdcc17a888d15c7165.png) . Su unidad en el Sistema Internacional es m/s2.
. Su unidad en el Sistema Internacional es m/s2.
o y su módulo por . Sus dimensiones son . Su unidad en el Sistema Internacional es m/s2.
En la mecánica newtoniana, para un cuerpo con masa constante, la aceleración del cuerpo es proporcional a la fuerza que actúa sobre él mismo (segunda ley de Newton):
donde F es la fuerza resultante que actúa sobre el cuerpo, m es la masa del cuerpo, y a es la aceleración. La relación anterior es válida en cualquier sistema de referencia inercial.
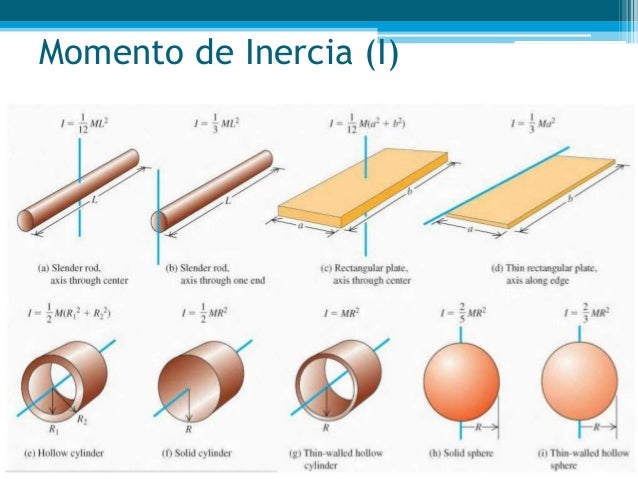
— El momento de inercia (símbolo I) es una medida de la inercia rotacional de un cuerpo. Cuando un cuerpo gira en torno a uno de los ejes principales de inercia, la inercia rotacional puede ser representada como una magnitud escalar llamada momento de inercia. Sin embargo, en el caso más general posible la inercia rotacional debe representarse por medio de un conjunto de momentos de inercia y componentes que forman el llamado tensor de inercia. La descripción tensorial es necesaria para el análisis de sistemas complejos, como por ejemplo en movimientos giroscópicos.
El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema de partículas en rotación, respecto a un eje de giro. El momento de inercia sólo depende de la geometría del cuerpo y de la posición del eje de giro; pero no depende de las fuerzas que intervienen en el movimiento.
El momento de inercia desempeña un papel análogo al de la masa inercial en el caso del movimiento rectilíneo y uniforme. Es el valor escalar del momento angular longitudinal de un sólido rígido.
3.2 Ecuación fundamental de la dinámica de la rotación.
—
movimiento de un cuerpo rigido alrededor de un eje fijo
- 1. ROTACIÓN DE UN OBJETO RIGIDO ENTORNO A UN EJE FIJO “Sonríe , tu sonrisa es lo mas bello q puede haber”
- 2. ROTACIÓN ENTORNO A UN EJE FIJO Cuando un cuerpo gira con respecto a un eje fijo, cualquier punto P ubicado en dicho cuerpo se mueven a lo largo de una trayectoria circular. Este movimiento depende del movimiento angular del cuerpo con respecto al eje. Por este motivo, estudiaremos primero las propiedades de movimiento angular del cuerpo ante de analizar el movimiento circular de P. “Amo la luz porque me muestra el camino; y tambien amo la oscuridad porque me muestra las estrellas”
- 3. Saberes previos • Velocidad angular: La rapidez de cambio de la posición angular se llama velocidad angular ω. Como dθ se tiene durante el instante dt de tiempo, entonces: ω= 𝑑θ 𝑑𝑡 (rad/s) • Aceleración angular: α mide la rapidez de cambio de la evlocidad angular: Por ello, la magnitud de este vector se puede escribir en la forma. • α= 𝑑ω 𝑑𝑡 (rad/𝑠2 ) “Solo existen dos días del año en que no se puede hacer nada uno se llama ayer y otro mañana”
- 4. • Periodo: es el tiempo que la partícula tarda en dar una vuelta completa. 𝑇 = 𝑡 𝑇 𝑁° 𝑑𝑒 𝑣𝑢𝑒𝑙𝑡𝑎𝑠 (seg) • Frecuencia: Es el numero de vueltas o revoluciones que da la partícula en movimiento por unidad de tiempo. • 𝑓 = 𝑁°𝑑𝑒 𝑣𝑢𝑒𝑙𝑡𝑎𝑠 𝑡 𝑇 = 1 𝑇 (RPS, RPM, HERTZ) “Yo no tengo la culpa de que las personas normales estén en la tierra”
- 5. Cuando la aceleración angular es constante: ω= ω0+𝛼𝑡 θ= 𝜃0+𝜔0 𝑡 + 1 2 𝛼 𝑐 𝑡2 𝜔2 = 𝜔2 + 2𝛼 𝑐(𝜃 − 𝜃0) “Hago lo que hago por que me gusta y no porque que te gusta”
- 6. Formulas adicionales V= 𝜔𝑟 𝑎 𝑐 = 𝑣 𝑡𝑎𝑛𝑔𝑒𝑛𝑐𝑖𝑎𝑙2 𝑟 = 𝜔2 𝑟 𝜃 = 𝜔𝑡 𝑎 𝑡 = 𝛼𝑟 𝜔 = 2𝜋𝑓 𝑎 𝑡 = 𝜔2 𝑟 𝜔 = 2𝜋 𝑇 𝑣 𝑡𝑎𝑛𝑔𝑒𝑛𝑐𝑖𝑎𝑙 = 𝑟 𝜃 𝑡 “Si todo en el mundo se basa en fe y amor entonces habrían mas iglesias que bancos”
- 7. APLICACIONES 1. TRANSMICIONES A B C 𝑉𝐴 > 𝑉𝐵 𝜔 𝐴 = 𝜔 𝐵 = 𝜔 𝐶 𝑉𝐴 𝑟𝐴 = 𝑉𝐵 𝑟𝐵 = 𝑉𝐶 𝑟𝐶 “Si no te gusta enseñar entonces no lo hagas, pero no nos metas mas conceptos incorrectos”
- 8. 1 2 3 𝑉1 = 𝑉2 = 𝑉3 𝜔1 𝑟1 = 𝜔2 𝑟2 = 𝜔3 𝑟3 “Los engranajes me enseñaron que no siempre tenemos que ir por el mismo sentido para complementarnos correctamente”
- 9. 𝑉1 = 𝑉2 = 𝑉3 𝜔1 𝑟1 = 𝜔2 𝑟2 = 𝜔3 𝑟3 1 2 3 “Los engranajes me enseñaron que siendo totalmente diferentes solo necesitamos estar unidos para poder funcionar”
- 10. Mas aplicaciones • Además de aplicar en correas de transmisión, también podemos emplear en poleas, engranajes, etc. • Podemos verlo en las montañas rusas, en la rueda de un vehículo, en un vehículo pasando por una curva, en los ventiladores, en los motores, etc. “No prometas cuando estás feliz. No respondas cuando estas enojado. No decidas cuando estas triste”
- 11. • Karen Alata Mamani • Juan Carlos Quispe Cahuina “Con tan solo haberlos conocido me di cuenta que la vida no me odia tanto” Integrantes: GRACIAS
— El análisis dinámico comprende el análisis de las fuerzas, desplazamientos, velocidades y aceleraciones que aparecen en una estructura o mecanismo como resultado de los desplazamientos y deformaciones que aparecen en la estructura o mecanismo.
Gran parte de estos análisis pueden ser simplificados al reducir el mecanismo o estructura a un sistema lineal, con lo que es posible aplicar el principio de superposición para trabajar con casos simplificados del mecanismo.
Método directo o de Newton
Este método analiza un mecanismo considerando cada una de sus partes rígidas como un sólido rígido perfecto, y plantea un sistema de ecuaciones diferenciales de movimiento directamente basadas en las leyes de Newton, que en general resulta complejo y difícil de integrar ya que raramente la elección de coordenadas y referencias respetará las simetrías útiles del problema. Una variación trivial de este método es escribir introducir coordenadas angulares, para poder escribir algunas de las ecuaciones del movimientos en términos de momentos de fuerzas, así las ecuaciones básicas usadas en el método directo son:
![\begin{cases} \mathbf{F}_i = m_i\mathbf{a}_i \\
\mathbf{r}_{Oi}\times \mathbf{F}_i = [\mathbf{I}] \boldsymbol\alpha \end{cases}](https://upload.wikimedia.org/math/e/1/5/e1579138cdac60eaa5c3b7ee1b2954be.png)
4. Leyes de conservación
4.1. Cantidad de movimiento lineal.
¿Qué es el momento lineal?
Siempre que hablamos de movimiento nos referimos a los conceptos de posición, velocidad y aceleración para describirlo. Y cuando nos referimos a interacciones entre cuerpos siempre hablamos de fuerzas.
En forma natural, estos dos hechos físicos, movimiento de un cuerpo y fuerzas que actúan sobre él, se relacionan.
Todos sabemos que un cuerpo en movimiento tiene la capacidad de ejercer una fuerza sobre otro que se encuentre en su camino. Llamaremos momento lineal o cantidad de movimiento a la magnitud que nos permite medir esta capacidad (algunos la llaman momentum).
Fue el propio Newton quien introdujo el concepto de momento lineal (aunque él lo llamaba cantidad de movimiento) que combina las magnitudes características de una partícula material en movimiento: su masa (toda partícula material tiene masa) y su velocidad (magnitud que caracteriza el movimiento).
La idea intuitiva tras esta definición está en que la "cantidad de movimiento" (el momento lineal o momentum) dependía tanto de la masa como de la velocidad: si podemos imaginar una mosca y un camión, ambos moviéndose a 40 km/h, la experiencia cotidiana dice que la mosca se puede detener con la mano, mientras que el camión no, aunque los dos vayan a la misma velocidad.
Esta intuición llevó a definir una magnitud que fuera proporcional tanto a la masa del objeto móvil como a su velocidad.
El momento lineal es una magnitud que asocia la masa con la velocidad.
Todos estos hechos tienen en común la magnitud cantidad de movimiento o momento lineal. Como ya lo dijimos, esta magnitud combina la inercia y el movimiento, o, lo que es lo mismo, la masa y la velocidad.
Un cuerpo puede tener una gran cantidad de movimiento (momento lineal) si tiene una masa muy grande o si se mueve a gran velocidad.
Matemáticamente, el momento lineal ( ) se define como:
) se define como: 
Por tanto, el momento lineal (), es una magnitud vectorial (kg m/s), ya que resulta de multiplicar un escalar (la masa en kg) por un vector (la velocidad, en m/s). Su dirección y sentido coinciden con los del vector velocidad.
Matemáticamente, el momento lineal (
Por tanto, el momento lineal (
¿De qué depende el momento lineal?
Como dato previo, antes de continuar, no se debe confundir el concepto de momento lineal con otro concepto básico de la mecánica newtoniana, denominado momento angular, que es una magnitud diferente.
Ahora trataremos de investigar de qué depende la magnitud vectorial definida como momento lineal:
En la imagen a la derecha vemos unas bolas de billar, las cuales, durante un juego, chocarán entre sí y con la banda de la mesa. En todos los casos supondremos que el choque dura una décima de segundo.
En la imagen a la derecha vemos unas bolas de billar, las cuales, durante un juego, chocarán entre sí y con la banda de la mesa. En todos los casos supondremos que el choque dura una décima de segundo.
Impulso mecánico
Para que una bola de billar posea momento lineal, hay que proporcionárselo de alguna forma. Si observamos a un jugador de billar, resulta evidente que el momento lineal que adquiere la bola depende del golpe que se la da con el taco.
También observamos que ese momento lineal varía después de un choque con otra bola o con la banda de la mesa.
La magnitud que mide la variación del momento lineal de una partícula, y de la cual depende, se llama impulso.
4.2. Cantidad de movimiento angular.
Momento angular
El momento angular o momento cinético es una magnitud física importante en todas las teorías físicas de la mecánica, desde la mecánica clásica a la mecánica cuántica, pasando por la mecánica relativista. Su importancia en todas ellas se debe a que está relacionada con las simetrías rotacionales de los sistemas físicos. Bajo ciertas condiciones de simetría rotacional de los sistemas es una magnitud que se mantiene constante con el tiempo a medida que el sistema evoluciona, lo cual da lugar a una ley de conservación conocida como ley de conservación del momento angular. El momento angular para un cuerpo rígido que rota respecto a un eje, es la resistencia que ofrece dicho cuerpo a la variación de la velocidad angular. En el Sistema Internacional de Unidades el momento angular se mide en kg·m²/s.
Momento angular de una masa puntual
En mecánica newtoniana, el momento angular de una partícula o masa puntual con respecto a un punto O del espacio se define como el momento de su cantidad de movimiento  con respecto a ese punto. Normalmente se designa mediante el símbolo
con respecto a ese punto. Normalmente se designa mediante el símbolo  . Siendo
. Siendo  el vector que une el punto O con la posición de la masa puntual, será
el vector que une el punto O con la posición de la masa puntual, será
con respecto a ese punto. Normalmente se designa mediante el símbolo . Siendo el vector que une el punto O con la posición de la masa puntual, será
El vector  es perpendicular al plano que contiene
es perpendicular al plano que contiene  y
y  , en la dirección indicada por la regla del producto vectorial o regla de la mano derecha y su módulo o intensidad es:
, en la dirección indicada por la regla del producto vectorial o regla de la mano derecha y su módulo o intensidad es:
es perpendicular al plano que contiene y , en la dirección indicada por la regla del producto vectorial o regla de la mano derecha y su módulo o intensidad es:
esto es, el producto del módulo del momento lineal por su brazo ( en el dibujo), definido éste como la distancia del punto respecto al que se toma el momento a la recta que contiene la velocidad de la partícula.
en el dibujo), definido éste como la distancia del punto respecto al que se toma el momento a la recta que contiene la velocidad de la partícula.
en el dibujo), definido éste como la distancia del punto respecto al que se toma el momento a la recta que contiene la velocidad de la partícula.Conservación del momento angular clásico
Cuando la suma de los momentos externos es cero  , hemos visto que:
, hemos visto que:
, hemos visto que:
Eso quiere decir que  . Y como
. Y como  es un vector, es constante tanto en módulo como en dirección.
es un vector, es constante tanto en módulo como en dirección.
. Y como es un vector, es constante tanto en módulo como en dirección.
Consideremos un objeto que puede cambiar de forma. En una de esas formas, su Momento de inercia es  y su velocidad angular
y su velocidad angular  . Si el objeto cambia de forma (sin intervención de un momento externo) y que la nueva distribución de masas hace que su nuevo Momento de inercia sea
. Si el objeto cambia de forma (sin intervención de un momento externo) y que la nueva distribución de masas hace que su nuevo Momento de inercia sea  , su velocidad angular cambiará de manera tal que:
, su velocidad angular cambiará de manera tal que:
y su velocidad angular . Si el objeto cambia de forma (sin intervención de un momento externo) y que la nueva distribución de masas hace que su nuevo Momento de inercia sea , su velocidad angular cambiará de manera tal que:
En algunos casos el momento de inercia se puede considerar un escalar. Entonces la dirección del vector velocidad angular no cambiará. Solo cambiará la velocidad de rotación.
Hay muchos fenómenos en los cuales la conservación del momento angular tiene mucha importancia. Por ejemplo:
- En todos las artes y los deportes en los cuales se hacen vueltas, piruetas, etc. Por ejemplo, para hacer una pirueta, una bailarina o una patinadora toman impulso con los brazos y una pierna extendida para aumentar sus momentos de inercia alrededor de la vertical. Después, cerrando los brazos y la pierna, disminuyen sus momentos de inercia, lo cual aumenta la velocidad de rotación. Para terminar la pirueta, la extensión de los brazos y una pierna, permite disminuir la velocidad de rotación. Sucede lo mismo con el salto de plataforma o el trampolín. También es importante en el ciclismo y motociclismo, ya que la conservación del momento angular es la responsable de la sencillez con que es posible mantener el equilibrio.
- Para controlar la orientación angular de un satélite o sonda espacial. Como se puede considerar que los momentos externos son cero, el momento angular y luego, la orientación del satélite no cambian. Para cambiar esta orientación, un motor eléctrico hace girar un volante de inercia. Para conservar el momento angular, el satélite se pone a girar en el sentido opuesto. Una vez en la buena orientación, basta parar el volante de inercia, lo cual para el satélite. También se utiliza el volante de inercia para parar las pequeñas rotaciones provocadas por los pequeños momentos inevitables, como el producido por el viento solar.
- Algunas estrellas se contraen convirtiéndose en púlsar (estrella de neutrones). Su diámetro disminuye hasta unos kilómetros, su momento de inercia disminuye y su velocidad de rotación aumenta enormemente. Se han detectado pulsares con periodos rotación de tan sólo unos milisegundos.
- Debido a las mareas, la Luna ejerce un momento sobre la Tierra. Este disminuye el momento angular de la Tierra y, debido a la conservación del momento angular, el de la Luna aumenta. En consecuencia, la Luna aumenta su energía alejándose de la Tierra y disminuyendo su velocidad de rotación (pero aumentando su momento angular). La Luna se aleja y los días y los meses lunares se alargan.
5. Trabajo de una fuerza y energías mecánicas.
5.1 Trabajo mecánico y energía cinética.
—Se llama trabajo mecánico a aquel desarrollado por una fuerza cuando ésta logra modificar el estado de movimiento que tiene un objeto. El trabajo mecánico equivale, por lo tanto, a la energía que se necesita para mover el objeto en cuestión.
En este contexto, el trabajo mecánico puede entenderse como una magnitud física de tipo escalar, que se expresa mediante la unidad de energía conocida como julio. Siempre que una fuerza se aplica sobre un cuerpo y lo desplaza, realiza un trabajo mecánico que puede medirse en julios.
— Definición e interpretación del trabajo mecánico.
Consideremos una partícula  sobre la que actúa una fuerza , función de la posición de la partícula en el espacio, esto es
sobre la que actúa una fuerza , función de la posición de la partícula en el espacio, esto es  y sea
y sea  un desplazamiento elemental (infinitesimal) experimentado por la partícula durante un intervalo de tiempo
un desplazamiento elemental (infinitesimal) experimentado por la partícula durante un intervalo de tiempo  . Llamamos trabajo elemental,
. Llamamos trabajo elemental,  , de la fuerza durante el desplazamiento elemental al producto escalar
, de la fuerza durante el desplazamiento elemental al producto escalar  ; esto es,
; esto es,
sobre la que actúa una fuerza , función de la posición de la partícula en el espacio, esto es y sea un desplazamiento elemental (infinitesimal) experimentado por la partícula durante un intervalo de tiempo . Llamamos trabajo elemental, , de la fuerza durante el desplazamiento elemental al producto escalar ; esto es,
Si representamos por  la longitud de arco (medido sobre la trayectoria de la partícula) en el desplazamiento elemental, esto es
la longitud de arco (medido sobre la trayectoria de la partícula) en el desplazamiento elemental, esto es  , entonces el vector tangente a la trayectoria viene dado por
, entonces el vector tangente a la trayectoria viene dado por  y podemos escribir la expresión anterior en la forma
y podemos escribir la expresión anterior en la forma
la longitud de arco (medido sobre la trayectoria de la partícula) en el desplazamiento elemental, esto es , entonces el vector tangente a la trayectoria viene dado por y podemos escribir la expresión anterior en la forma
donde representa el ángulo determinado por los vectores  y
y  y
y  es la componente de la fuerza F en la dirección del desplazamiento elemental .
es la componente de la fuerza F en la dirección del desplazamiento elemental .
representa el ángulo determinado por los vectores y y es la componente de la fuerza F en la dirección del desplazamiento elemental .El trabajo realizado por la fuerza
durante un desplazamiento elemental de la partícula sobre la que está aplicada es una magnitud escalar, que podrá ser positiva, nula o negativa, según que el ángulo sea agudo, recto u obtuso.
Si la partícula P recorre una cierta trayectoria en el espacio, su desplazamiento total entre dos posiciones A y B puede considerarse como el resultado de sumar infinitos desplazamientos elementales y el trabajo total realizado por la fuerza en ese desplazamiento será la suma de todos esos trabajos elementales; o sea
y el trabajo total realizado por la fuerza en ese desplazamiento será la suma de todos esos trabajos elementales; o sea
Esto es, el trabajo viene dado por la integral curvilínea de a lo largo de la curva  que une los dos puntos; en otras palabras, por la circulación de sobre la curva entre los puntos A y B. Así pues, el trabajo es una magnitud física escalar que dependerá en general de la trayectoria que una los puntos A y B, a no ser que la fuerza seaconservativa, en cuyo caso el trabajo resultará ser independiente del camino seguido para ir del punto A al punto B, siendo nulo en una trayectoria cerrada. Así, podemos afirmar que el trabajo no es una variable de estado.
que une los dos puntos; en otras palabras, por la circulación de sobre la curva entre los puntos A y B. Así pues, el trabajo es una magnitud física escalar que dependerá en general de la trayectoria que una los puntos A y B, a no ser que la fuerza seaconservativa, en cuyo caso el trabajo resultará ser independiente del camino seguido para ir del punto A al punto B, siendo nulo en una trayectoria cerrada. Así, podemos afirmar que el trabajo no es una variable de estado.
a lo largo de la curva que une los dos puntos; en otras palabras, por la circulación de sobre la curva entre los puntos A y B. Así pues, el trabajo es una magnitud física escalar que dependerá en general de la trayectoria que una los puntos A y B, a no ser que la fuerza seaconservativa, en cuyo caso el trabajo resultará ser independiente del camino seguido para ir del punto A al punto B, siendo nulo en una trayectoria cerrada. Así, podemos afirmar que el trabajo no es una variable de estado.
— Cálculos sencillos de trabajo de fuerzas.
En física, la palabra "trabajo" tiene un significado diferente al que se usa en las conversaciones cotidianas. Específicamente, el término trabajo se aplica cuando una fuerza física causa el movimiento de un objeto. En general, si una gran fuerza causa que un objeto se mueva muy lejos, implica que se ha realizado mucho trabajo. Por el contrario, si la fuerza es pequeña, o si el objeto no se ha desplazado mucho, se ha realizado poco trabajo. La fuerza puede calcularse con la fórmula Trabajo = F × D × Coseno(θ), donde F = fuerza (en newtons), D = desplazamiento (en metros), y θ = el ángulo entre el vector de fuerza y la dirección del movimiento.
- 1Encuentra la dirección del vector de fuerza y la dirección del movimiento.Para empezar, es importante que puedas identificar tanto la dirección en que el objeto se está moviendo, como la dirección desde la que se aplica la fuerza. Ten en cuenta que el objeto no siempre se mueve en la misma dirección en la que se aplica la fuerza (por ejemplo, si tiras de una carreta y eres más alto que esta, estarás aplicando una fuerza diagonal para moverla). Sin embargo, en esta sección vamos a tratar con situaciones en las que la fuerza y el desplazamiento del objeto tienen la misma dirección. En la siguiente sección podrás encontrar información sobre cómo calcular el trabajo cuando ambos factores no tienen la misma dirección.
- Para hacer este proceso fácil de entender, vamos a continuar con un ejemplo. Supongamos que un tren de juguete tira hacia adelante de un vagón. En este caso, tanto el vector de fuerza y la dirección del movimiento del tren tienen la misma dirección (hacia adelante). En los siguientes pasos, usaremos esta información para calcular el trabajo realizado en el objeto.
-
2Encuentra el desplazamiento del objeto. La primera variable que necesitamos para la fórmula es “D”, o desplazamiento, que suele ser fácil de encontrar. El desplazamiento es, simplemente, la distancia a la que la fuerza ha movido el objeto desde su punto de partida. En problemas académicos, esta información suele proporcionarse o puede deducirse a partir de otra información en el problema. En el mundo real, todo lo que tienes que hacer para encontrar el desplazamiento es medir la distancia que recorre el objeto.
- Ten en cuenta que, para usar la fórmula del trabajo, las medidas de distancia deben expresarse en metros.
- En nuestro ejemplo del tren de juguete, supongamos que estamos calculando el trabajo realizado en el tren a medida que viaja por la vía. Si su recorrido empieza en cierto punto y termina en otro situado a 2 metros, podemos usar 2 metros para nuestro valor de "D" en la fórmula.
-
3Encuentra la fuerza aplicada al objeto. A continuación, encuentra la magnitud de la fuerza causante del movimiento del objeto. Esta es una medida de la "intensidad" de la fuerza (cuanto más grande es su magnitud, más fuerte empuja al objeto y más rápido lo acelera). [1] Si no se proporciona el dato de la magnitud de la fuerza, se puede derivar a partir de la masa y la aceleración del movimiento (asumiendo que no existan otras fuerzas contrarias actuando sobre él), con la fórmula F = M × A.[2]
- Ten en cuenta que, para usar la fórmula del trabajo, las medidas de fuerza deben expresarse en newtons.
- En nuestro ejemplo, supongamos que no conocemos la magnitud de la fuerza. Sin embargo, digamos que sí sabemos que el tren de juguete tiene una masa de 0,5 kilogramos, y que la fuerza causa que se acelere a una tasa de 0,7 metros/segundo. En este caso, podemos calcular la magnitud, multiplicando M × A = 0,5 × 0,7 = 0,35 Newtons.
-
4Multiplica Fuerza × Distancia. Una vez que sepas la magnitud de la fuerza que actúa sobre el objeto y la distancia que este se ha desplazado, el resto es sencillo. Solamente multiplica estos dos valores y obtendrás el trabajo.
- Es el momento de resolver nuestro problema de ejemplo. Con una fuerza de 0,35 Newtons y una distancia de desplazamiento de 2 metros, nuestra respuesta es una simple multiplicación: 0,35 × 2 = 0,7 julios.
- Tal vez hayas notado que, en la fórmula proporcionada en la introducción, hay un término adicional: Coseno(θ). Como se discutió anteriormente, en este ejemplo, la fuerza y la dirección del movimiento tienen la misma dirección. Esto significa que el ángulo entre ellas es 0o. Ya que el Coseno(θ) = 1, no necesitamos incluirlo (ya que solo estamos multiplicando por 1).
-
5Expresa tu respuesta en julios. En física, los valores del trabajo (y en muchas otras cantidades) casi siempre se expresan en una unidad de medida llamada julio. Un julio se define como un newton de fuerza ejercida sobre un metro, o, en otras palabras, un newton × metro.[3] Esto tiene sentido, ya que si estás multiplicando distancia por fuerza, es lógico que la respuesta obtenida tenga una unidad de medida equivalente a la multiplicación de las unidades de fuerza y distancia.
- Ten en cuenta que el julio tiene una definición alternativa: un vatio de potencia emitida en un segundo.[4] Lee la sección siguiente para encontrar una discusión más detallada sobre la relación de potencia y trabajo.




5.2 Trabajo de fuerzas conservativas.
— Trabajo de la fuerza de gravedad.
En la teoría newtoniana de la gravitación, los efectos de la gravedad son siempre atractivos, y la fuerza resultante se calcula respecto del centro de gravedad de ambos objetos (en el caso de la Tierra, el centro de gravedad es su centro de masas, al igual que en la mayoría de los cuerpos celestes de características homogéneas). La gravedad newtoniana tiene un alcance teórico infinito; pero la fuerza es mayor si los objetos están próximos, y mientras se van alejando dicha fuerza pierde intensidad. Además Newton postuló que la gravedad es una acción a distancia (y por tanto a nivel relativista no es una descripción correcta, sino solo una primera aproximación para cuerpos en movimiento muy lento comparado con la velocidad de la luz).
La ley de la gravitación universal formulada por Isaac Newton postula que la fuerza que ejerce una partícula puntual con masa  sobre otra con masa
sobre otra con masa  es directamente proporcional al producto de las masas, e inversamente proporcional al cuadrado de ladistancia que las separa:
es directamente proporcional al producto de las masas, e inversamente proporcional al cuadrado de ladistancia que las separa:
sobre otra con masa es directamente proporcional al producto de las masas, e inversamente proporcional al cuadrado de ladistancia que las separa:
donde  es el vector unitario que dirigido de la partícula 1 a la 2, esto es, en la dirección del vector
es el vector unitario que dirigido de la partícula 1 a la 2, esto es, en la dirección del vector  , y
, y  es laconstante de gravitación universal, siendo su valor aproximadamente 6,674 × 10−11 N·m²/kg².
es laconstante de gravitación universal, siendo su valor aproximadamente 6,674 × 10−11 N·m²/kg².
es el vector unitario que dirigido de la partícula 1 a la 2, esto es, en la dirección del vector , y es laconstante de gravitación universal, siendo su valor aproximadamente 6,674 × 10−11 N·m²/kg².
Por ejemplo, usando la ley de la gravitación universal, podemos calcular la fuerza de atracción entre la Tierra y un cuerpo de 50 kg. La masa de la Tierra es 5,974 × 1024 kg y la distancia entre el centro de gravedad de la Tierra (centro de la tierra) y el centro de gravedad del cuerpo es 6378,14 km (igual a 6 378 140 m, y suponiendo que el cuerpo se encuentre sobre la línea del Ecuador). Entonces, la fuerza es:

La fuerza con que se atraen la Tierra y el cuerpo de 50 kg es 490.062 N (Newtons, Sistema Internacional de Unidades), lo que representa 50 kgf (kilogramo-fuerza, Sistema Técnico), como cabía esperar, por lo que decimos simplemente que el cuerpo pesa 50 kg.
— Concepto de energía potencial gravitatoria.
En un sistema físico, la energía potencial es la energía que mide la capacidad que tiene dicho sistema para realizar un trabajo en función exclusivamente de su posición o configuración. Puede pensarse como la energía almacenada en el sistema, o como una medida del trabajo que un sistema puede entregar. Suele abreviarse con la letra  o
o  .
.
o .
La energía potencial puede presentarse como energía potencial gravitatoria, energía potencial electrostática, y energía potencial elástica.
Más rigurosamente, la energía potencial es una magnitud escalar asociada a un campo de fuerzas (o como en elasticidad un campo tensorial de tensiones). Cuando la energía potencial está asociada a un campo de fuerzas, la diferencia entre los valores del campo en dos puntos A y B es igual al trabajo realizado por la fuerza para cualquier recorrido entre B y A.
— Trabajo de la fuerza elástica.
En física, la ley de elasticidad de Hooke o ley de Hooke, originalmente formulada para casos de estiramiento longitudinal, establece que el alargamiento unitario que experimenta un material elástico es directamente proporcional a la fuerza aplicada sobre el mismo:
:
siendo el alargamiento,  la longitud original,
la longitud original,  : módulo de Young,
: módulo de Young,  la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
el alargamiento, la longitud original, : módulo de Young, la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
Esta ley recibe su nombre de Robert Hooke, físico británico contemporáneo de Isaac Newton, y contribuyente prolífico de laarquitectura. Esta ley comprende numerosas disciplinas, siendo utilizada en ingeniería y construcción, así como en la ciencia de los materiales. Ante el temor de que alguien se apoderara de su descubrimiento, Hooke lo publicó en forma de un famoso anagrama,ceinost uv, revelando su contenido un par de años más tarde. El anagrama significa Ut tensio sic vis ("como la extensión, así la fuerza").
5.3 Energía mecánica. Ley de conservación.
— Concepto de energía mecánica.
La energía mecánica se puede definir como la capacidad de producir un trabajo mecánico que posee un cuerpo debido a causas de origen mecánico, como su posición o su velocidad. Existen dos formas de energía mecánica que son la energía cinética y la energía potencial.
Para sistemas abiertos formados por partículas que interactúan mediante fuerzas puramente mecánicas o campos conservativos la energía se mantiene constante con el tiempo:
.
Donde:
 , es la energía cinética del sistema.
, es la energía cinética del sistema. , es la energía potencial gravitacional del sistema.
, es la energía potencial gravitacional del sistema. , es la energía potencial elástica del sistema.
, es la energía potencial elástica del sistema.
Es importante notar que la energía mecánica así definida permanece constante si únicamente actúan fuerzas conservativas sobre las partículas. Sin embargo,existen ejemplos de sistemas de partículas donde la energía mecánica no se conserva:
- Sistemas de partículas cargadas en movimiento. En ese caso los campos magnéticos no derivan de un potencial y la energía mecánica no se conserva, ya que parte de la energía mecánica «se transforma» en energía del campo electromagnético y viceversa.
- Sistemas termodinámicos que experimentan cambios de estado. En estos sistemas la energía mecánica puede transformarse en energía térmica o energía interna. Cuando hay producción de energía térmica, en general, existirá disipación y el sistema habrá experimentado un cambio reversible (aunque no en todos los casos). Por lo que en general estos sistemas aún pudiendo experimentar cambios reversibles sin disipación tampoco conservarán la energía mecánica debido a que la única variable conservada es la energía interna.
- Mecánica de medios continuos disipativos que involucran fluidos disipativos o sólidos anelásticos (plasticidad, viscoelasticidad, etc), que involucran la aparición de deformaciones irreversibles y por tanto disipación, aparición de calor o cambios internos irreversibles, donde la variación de entropía no es nula.
— Conservación de la energía mecánica: Wnc= 0 = ?E ? Ei = E¦
El Principio de conservación de la energía indica que la energía no se crea ni se destruye; sólo se transforma de unas formas en otras. En estas transformaciones, la energía total permanece constante; es decir, la energía total es la misma antes y después de cada transformación.
En el caso de la energía mecánica se puede concluir que, en ausencia de rozamientos y sin intervención de ningún trabajo externo, la suma de las energías cinética y potencial permanece constante. Este fenómeno se conoce con el no En todos los casos donde actúen fuerzas conservativas, la energía mecánica total, es decir, la energía cinética más la energía potencial en cualquier instante de la trayectoria es la misma; por ejemplo, la fuerza gravitacional, pues en cualquier trabajo que realice un cuerpo contra la fuerza de gravedad de la Tierra, la energía se recuperará íntegramente cuando el cuerpo descienda.
Em = Ec + Ep
donde Em = energía mecánica total expresada en joules. Sustituyendo las expresiones de las energías:
Em = 1/2mv2 + mgh.
En resumen, "la energía existente en un sistema es una cantidad constante que no se crea ni se destruye, únicamente se transforma". Respecto de fuerzas no conservativas (por ejemplo la fricción) no podemos hablar de energía potencial; sin embargo, la conservación de la energía se mantiene en la forma:
Em = Ec + Q donde Q es ahora el calor disipado al ambiente. En este caso la EC disminuyesiempre y eventualmente el calor transporta la energía a la atmósfera.Principios de la Conservación de la Energía Mecánica
5.4 Choques.
— Concepto de choque entre partículas.
El Gran Colisionador de Hadrones, GCH (en inglés Large Hadron Collider, LHC) es un acelerador y colisionador departículas ubicado en la Organización Europea para la Investigación Nuclear (CERN, sigla que corresponde a su antiguo nombre en francés: Conseil Européen pour la Recherche Nucléaire); el LHC se encuentra cerca de Ginebra, en la fronterafranco-suiza. Fue diseñado para colisionar haces de hadrones, más exactamente de protones, de hasta 7 TeV de energía, siendo su propósito principal examinar la validez y límites del Modelo Estándar, el cual es actualmente el marco teórico de la física de partículas, del que se conoce su ruptura a niveles de energía altos.
Dentro del colisionador dos haces de protones son acelerados en sentidos opuestos hasta alcanzar el 99,99 % de la velocidad de la luz, y se los hace chocar entre sí produciendo altísimas energías (aunque a escalas subatómicas) que permitirían simular algunos eventos ocurridos inmediatamente después del big bang.
El LHC es el acelerador de partículas más grande y energético del mundo.1 Usa el túnel de 27 km de circunferencia creado para el Gran Colisionador de Electrones y Positrones (LEP en inglés) y más de 2000 físicos de 34 países y cientos de universidades y laboratorios han participado en su construcción.
Una vez enfriado hasta su temperatura de funcionamiento, que es de 1,9 K (menos de 2 grados por encima del cero absoluto o −271,15 °C), los primeros haces de partículas fueron inyectados el 1 de agosto de 2008,2 y el primer intento para hacerlos circular por toda la trayectoria del colisionador se produjo el 10 de septiembre del año 2008.3 Aunque las primeras colisiones a alta energía en principio estuvieron previstas para el 21 de octubre de 2008,4 el experimento fue postergado debido a una avería que produjo la fuga del helio líquido que enfría uno de los imanes superconductores.n. 1
— Clasificación en elásticas e inelásticas.
CLASIFICACIÓN DE LAS COLISIONES
Las colisiones se clasifican en:
Elásticas: cuando se conserva la energía cinética total.
Inelásticas: cuando parte de la energía cinética total se transforma en energía no recuperable (calor, deformación, sonido, etc.).
Perfectamente inelásticas: cuando los objetos permanecen juntos después de la colisión.
v1f = v2f
— Leyes de conservación en los choques elásticos.
En física, se denomina choque elástico a una colisión entre dos o más cuerpos en la que éstos no sufren deformaciones permanentes durante el impacto. En una colisión elástica se conservan tanto el momento lineal como la energía cinética del sistema, y no hay intercambio de masa entre los cuerpos, que se separan después del choque.
Las colisiones en las que la energía cinética no se conserva producen deformaciones permanentes de los cuerpos y se denominan inelásticas.
— Conservación de la cantidad de movimiento lineal.
— Conservación de la energía mecánica.
En mecánica, se denomina energía mecánica a la suma de las energías cinética y potencial (de los diversos tipos). En la energía potencial puede considerarse también la energía potencial elástica, aunque esto suele aplicarse en el estudio de problemas de ingeniería y no de física. Expresa la capacidad que poseen los cuerpos con masa de efectuar un trabajo.
Conservación de la energía mecánica
Para sistemas abiertos formados por partículas que interactúan mediante fuerzas puramente mecánicas o campos conservativos la energía se mantiene constante con el tiempo:
Es importante notar que la energía mecánica así definida permanece constante si únicamente actúan fuerzas conservativas sobre las partículas. Sin embargo existen ejemplos de sistemas de partículas donde la energía mecánica no se conserva:
- Sistemas de partículas cargadas en movimiento. En ese caso los campos magnéticos no derivan de un potencial y la energía mecánica no se conserva, ya que parte de la energía mecánica "se convierte" en energía del campo electromagnético y viceversa.
Sistemas con fuerzas disipativas. Las fuerzas disipativas como el rozamiento o fricción entre sólidos, entre un sólido y un fluido no pueden ser tratadas de modo puramente mecánica ya que implican la conversión de energía mecánica en energía calorífica.
Energía cinética de una partícula

Giio: Hola esta muy bien la información pero te falta justificar el texto y ajustar unas imágenes que están un poco grandes.
ResponderBorrarTe doy un 9 de calificación.
Este comentario ha sido eliminado por el autor.
ResponderBorrarBibiana: Esta bien solo hace falta que e texto este del mismo tamaño y las imagenes no esten tan grandes
ResponderBorrarMi calificacion 8.5
YASBETH PALOMARES RUIZ
ResponderBorrarLA INFORMACION ES UTIL,PERO ACOMODA LAS IMAGENES,PARA QUE TENGA MEJOR PRESENTACION
CALIFICACION 9
DULCE MOLINA ANAYA
ResponderBorrarQUE LA LETRA QUEDE DEL MISMO TAMAÑO Y ACOMODAR LAS IMAGENES
CALIF. 8.5
LUIS FERNANDO GARCIA
ResponderBorrarFALTA INFORMACIÓN, JUSTIFICAR EL TEXTO, QUITAR LOS HIPERVINCULOS.
CALIFICACIÓN: 7
RAUL VALADEZ GONZALEZ
ResponderBorrarLE FALTA JUSTIFICAR EL TEXTO CENTRAR LAS IMÁGENES AUMENTAR EL TAMAÑO DE LOS TITULOS
CALIFICACIÓN 8
Jorge Valdez Teniente
ResponderBorrarFalta justificar el texto
Calificacion 9
Alba Monserrat Rodriguez Mojica
ResponderBorrarAcomoda la letra aun mismo tamaño y justifica el texto
calificación: 8
Alan Francisco Jimenez
ResponderBorrarTiene buena información solo hay que justificar textos y el tamaño de la letra
calificacion 8
Leilani Martinez:
ResponderBorraracomoda las imagenes y que el texto este a un solo tamaño
calificación:8.5
Paulo Omar LErma Cortes
ResponderBorrarAcomodar texto:Color negritas hipervinculos tamaño y las imagenes que queden adentro, justificar.
calificacion 8
FATIMA ESPARZA RIOS
ResponderBorrarTRATA DE UNIFICAR EL TIPO DE LETRA,CHECAR TUS IMAGENES Y JUSTIFICAR
CALIFICACION 8
Maria Isabel Vargas Vargas
ResponderBorrarHace falta justificar la informacion y hacer un uso correcto del tamaño y tipo de la letra.
Calificacion: 8
Saul Gonzalez Rojas
ResponderBorrarFalta justificar y acomodar la letra.
Calificacion: 8
emmnauel gallardo
ResponderBorrartodo esta muy bn solo que hay que agrandar unpoco la letra en algunos textos
calf 8
SAIRA MIRANDA
ResponderBorrarEL CONTENIDO DE LA INFORMACIÓN ES BUENA, DEBERÍAS DAR UN TAMAÑO CORRECTO A TUS IMÁGENES Y JUSTIFICAR LOS TEXTOS.
CALIFICACIÓN: 8
Jose Andrés Medrano Alcalá:
ResponderBorrarEl Blog tiene buena información, solo que hay detalles en el texto de hipervinculos e imagenes algo grandes.
Calificación 8
Luis Martin Escamilla Tapia
ResponderBorrarTiene muy buena informacion, solo hay que acomodar el tamaño de la letra.
Calificacion: 9
Juan Angel Vazquez
ResponderBorrarEste Blog tiene muy buena informacion solo le falta quitar hinpervinculos y hacer la letra mas grande en unas partes de los textos.
Calificacion: 8